Ich konnte endlich meinen kleinen fahrenden Roboter weiterbauen. An elektrischen Komponenten habe ich so gut wie alles. Nun habe ich einen Prototypen des Unterbodens gedruckt. Die Form ist recht simple. Aber der Druck war nicht ganz so einfach. Der Unterboden hat eine Fläche von ca 12 cm x 15 cm. Ab ca 8 mm Druckhöhe fing das ganze Modell an, stark zu verbiegen (warpen). Erst den dritten Versuch konnte ich bis zum Ende drucken lassen.
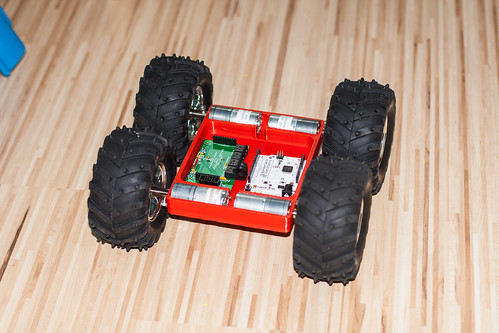
Die vier Motoren schnappen gut in die dafür vorgesehenen Halterungen. Ein kleiner Arduino fungiert als Hirn. Die grüne Platine daneben ist ein Motortreiber (H-Brücke). Es fehlt noch ein Funkmodul (die erste Version soll erst mal nur fernsteuerbar sein) und der Akku, welcher oben festgeschnallt wird.
Später kommen noch IR- und Ultraschall-Sensoren hinzu.
Ziel ist es später, dass der Roboter dann vor einem näher kommenden Objekt davon fährt und bei Umrundungen stehen bleibt. Ein Schafersatz für meine Hunde.