Lange ist es her, seit ich mich um das elektronische Schaf gekümmert habe. Mit dem Unterboden war ich nicht wirklich zufrieden. Nun habe ich mich endlich mal an einen neuen Versuch gewagt.
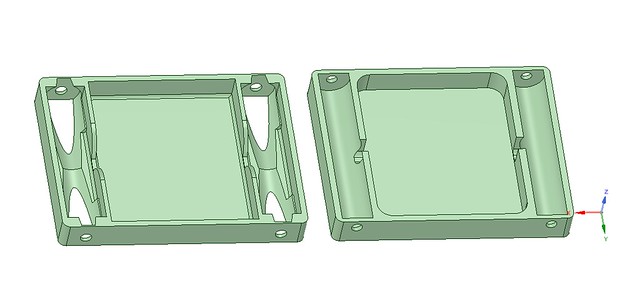
Die Motoren sind nun um 5° nach unten geneigt. Das ergibt ein bisschen mehr Bodenfreiheit und die Drehungen sollten ein bisschen leichter gehen. Eine 10° Neigung müsste ich auch noch mal ausprobieren.

Da der Raum für den Motor zu eng war, ist beim Eindrücken des Motors das Gehäuse ein bisschen aufgeplatz (links zu sehen). Die Layerhafung ist bei diesem Versuch auch nicht so ganz gut. Gedruckt habe ich mit ABS.
Dafür war die Haftung am Druckbett zu gut.
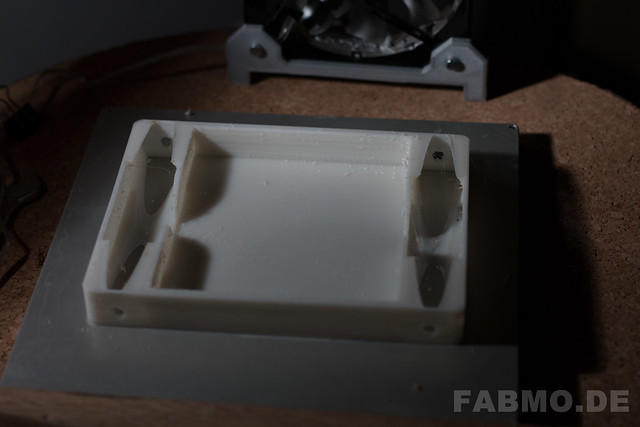
Obwohl die Maße 170 mm x 128 mm betragen hat sich keine einzige Ecke des Modells vom Druckbett abgehoben. Leider haftete das Modell auch nach dem Abkühlen noch so stark am Druckbett, dass ich es nur mit Mühe runterbrechen konnte. Vor dem Drucken kippe ich ein wenig Aceton (Achtung gut lüften!) auf das Druckbett und schwenke ein paar mal etwas ABS darin herum. Das ABS löst sich im Aceton etwas auf und klebt dann nach dem Trocknen am Druckbett fest. Die Schicht ist dabei kaum zu sehen, aber es reicht vollkommen aus, um als Haftgrund zu dienen.
Ich werde nachher noch mal einen Druck starten. Mit veränderter Motoraufnahme (etwas weiter), dickeren Wänden (2mm auf 4 mm) und leicht erhöhter Drucktemperatur (234°C auf 237°C). Druckzeit ca. 6 Stunden.